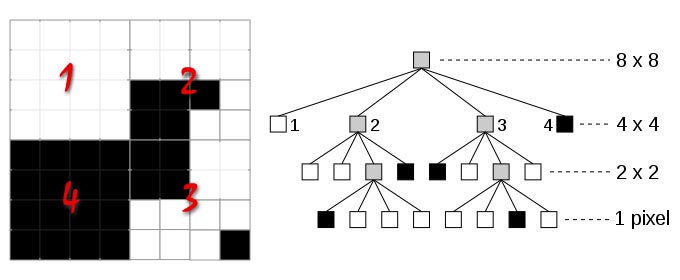
 Quadtree de uma imagem: os números mostram o primeiro nível da árvore, que divide a imagem em 4 nodos, onde os nodos 1 e 4 são folhas, respectivamente de cor branca e preta. Sempre que uma área só possue pixels de um mesmo valor, não se subdivide maisi a árvore e tem-se uma foiha. |
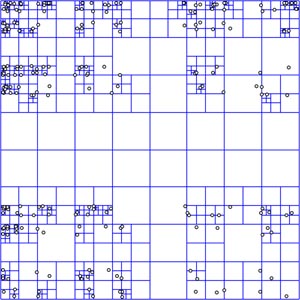 Quadtree representando um conjunto de pontos. Observe que, ao conttrário da árvore k-D, onde uma aresta está sempre sobre um ponto, na quadtree a subdivisão do espaço é homogênea e um ponto pode cair "dentro" de um quadrado. |
Uma árvore k-D pode ser construída usando o algoritmo que segue:
Entrada: Um conjunto de pontos P e a profundidade atual prof
Saida: A raiz de uma árvore k-D armazenando P
Algoritmo ConstroiArvKD(P,prof)
1. SE P contém apenas um ponto then
2. return uma folha contendo este ponto
3. SENÃO SE prof é plano ENTÃO
4.
divida P em dois
subconjuntos com uma linha vertical pela coordenada x mediana dos
pontos em P.
P1 é o conjunto de
pontos da esquerda e P2 o
conjunto de pontos da direita.
Pontos exatamente na linha
pertencem a
P1
5. SENÃO
6.
divida P em dois
subconjuntos com uma linha horizontal pela coordenada y mediana dos
pontos em P.
P1 é o conjunto de pontos acima da linha e P2 o
conjunto de pontos abaixo da linha.
Pontos exatamente na linha
pertencem a P1.
7. Vright <- ConstroiArvKD(P1,prof+1).
8. Vleft <- ConstroiArvKD(P2,prof+1).
9. Crie um nodo V com Vright e Vleft juntamente com seus filhos direito e esquerdo, respectivamente.
10. retorne V.
O autor afirma que este algoritmo pode ser executado em tempo O(n log n) e usa O(n) armazenamento.
Exibição demonstrativa interativa da construção de uma árvore k-D 2D:|
|
A função de busca é também um algoritmo recursivo. A função ramifica-se através da árvore até que encontre a caixa a que o registro da consulta pertence. Então faz um array com os valores próximos usando os pontos da caixa. Avalia se é preciso verificar outras caixas (sem pontos suficientes ou procurando pontos próximos). Se não tiver que verificar outras caixas, termina a busca e retorna o resultado. Se não, ramifica-se nos pares de caixas seguintes até que tenha pontos suficientes, e os mais próximos.
Pesquisar na árvore k-D por um registro com uma coordenada xy específica é como pesquisar em uma Arvore Binária de Pesquisa (BST), exceto que cada nível da árvore é associado com um discriminador. Por exemplo, assuma que estamos procurando no Banco de Dados por um registro localizado no ponto P=(69,50). Começamos pela comparação P com o endereço do ponto armazenado na raiz Se o endereço de P coincidir com o endereço do registro A, então a pesquisa retornará com sucesso. Se neste exemplo as posições não coincidirem (o endereço de A(40,50) édiferente de (69,50), a pesquisa deve continuar a descer de nível. O valor x do nodo A é comparado com o P para determinar em qual ramo seguir. Se o valor Ax de 40 for menor que o valor pesquisado de 69, nos direcionaremos para a subárvore da direita (todos nodos com valor de x maior ou igual a 40 estão na subárvore da direita). 0 valor de Ay não afeta a decisão de qual ramo se direcionar neste nível. Num segundo nível, P não coincide com a posição do registro C, então, outro ramo deve ser seguido. Entretanto, neste nível, o ramo a ser seguido é baseado nos valores de y de P e do registro C ( veja: 1 mod 2 = 1 ... nivel mod dimension = critério, 1 corresponde à coordenada y). Se o valor de Cy de 10 for menor que o valor Py de 5O, nós seguimos para a direita. Neste ponto, P é comparado com a posição de D. A comparação é feita e a pesquisa retorna com sucesso. Assim como na Árvore Binária de Busca (BST), se o resultado da pesquisa for um ponteiro nulo, então, o conteúdo pesquisado não está contido na árvore.
Assuma que nós desejamos imprimir a lista de todos registros que estão à uma certa distância d do ponto dado P. Nós usaremos a distância Euclidiana, que é: o ponto P é definido para estar dentro da distância d do ponto N se:
SQRT((Px-Nx)²+(Py-Ny)²)<=d
Se
o
resultado do processo de pesquisa for um nodo cujo valor do
discriminador for maior que o d acima, então não é
possível que qualquer registro na subárvore direita possa
estar dentro da distância d do valor procurado, desde
que todas chaves na dimensão são grandes também.
Similarmente, se o valor do discriminador do nodo corrente for d menor
que o valor procurado, então nenhum registro da subárvore
esquerda pode estar dentro do raio. Em alguns casos, a subárvore
em questão não precisa ser analisada, poupando muito
tempo. Geralmente o número de nodos que devem ser analisados
durante a pesquisa é relacionado ao número de registros
de dados que caem na pesquisa em questão.
Por exemplo, assuma que a
pesquisa será realizada para encontrar todos nodos na figura com
25 unidades do ponto (25,65). A pesquisa começa no nodo raiz,
que contém o registro A(40,45), que é exatamente 25
unidades do ponto procurado, deve ser reportado. Um procedimento de
pesquisa então determinará qual ramo da árvore
pegar. 0 círculo de pesquisa se estende para ambos esquerda e
direita da linha divisória de A, então ambos ramos da
árvore devem ser pesquisados. A subárvore da esquerda
é processada primeiro. Aqui, o registro B é checado e
encontrado para cair no círculo de pesquisa. Se o nodo B
não tem filhos, o processo da subárvore da esquerda
está completo. 0 processo da subárvore direita de A
começa então. As coordenadas do registro C são
checadas, e ao ser encontrado não cairá no círculo
de pesquisa. Assim, não deverá ser reportado. Entretanto,
é possível que nodos dentro das subárvores de C
possam cair dentro do círculo de pesquisa. Já que o
nível de C é 1, o discriminador para este nivel é
a coordenada y. Já que 6525 >10, nenhum registro da
subárvore esquerda de C pode cair no círculo de pesquisa.
Portanto, a subárvore esquerda de C
não precisa ser
analisada. Entretanto, nodos da subárvore direita de C podem
cair no círculo. Portanto é necessário proceder
para o nodo contendo o registro D. Novamente, D está fora do
círculo de pesquisa. Já que 25+25<69, nenhum registro
na subárvore direita de D pode cair no círculo de
pesquisa. Portanto apenas a subárvore esquerda de D precisa ser
procurada. Então é necessário comparar as
coordenadas de E contra o círculo de pesquisa. o Registro E cai
fora do círculo de pesquisa, e o processamento está
completo.
Quando
um nodo é visitado, uma função é usada para
checar a distância euclidiana entre o nodo e o ponto pesquisado.
Isso não é suficiente para checar se a diferença
entre as coordenadas x e y são menores que a distância
pesquisada porque o registro poderia estar fora do círculo de
pesquisa.
Inserindo
novo nodo na Árvore:
Inserir um novo nodo na
árvore kd é similar à inserção da Árvore
Binária de Busca (BST). O procedimento de pesquisa na
árvore kd é realizado até que um ponteiro nulo
seja encontrado, indicando um local propício para inserir um
novo nodo. Por exemplo, inserir um registro no endereço (10,50)
na árvore kd da figura requer uma pesquisa para o nodo E. Neste
ponto um novo registro é inserido na subárvore esquerda
de E.
Deletando
um nodo da Árvore:
Deletar um nodo da
árvore kd é similar ao deletar de uma Árvore
Binária de Busca (BST), mas ligeiramente mais difícil.
Assim como delecar de uma Árvore Binária de Busca
(BST), o primeiro passo é encontrar o nodo (chamado N) a ser
deletado. É necessário encontrar o filho de N que
será usado para substituir N na árvore. Se N não
tiver filhos ele é substituído por um ponteiro nulo. Note
que se N tem um filho que por sua vez também tem, não
podemos simplesmente gravar no lugar de N o ponteiro para seu filho,
como seria feito na Árvore Binária de Busca (BST).
Para fazer isso então, teríamos de mudar o nível
de todos nodos na subárvore, e portando o discriminador usado
para a pesquisa também seria mudado. 0 resultado é que a
subárvore não seria mais uma árvore kd porque
violaria a propriedade da Arvore Binária de Pesquisa (BST) para
o discriminador.
Similar
à delação na Árvore Binária de Busca
(BST), o registro armazenado em N deve ser substituído
pelo registro da subárvore direita com o menor valor do
discriminador de N ou pelo registro da subárvore esquerda com o
maior valor para o discriminador. Assuma que N estava em um
nível ímpar e portanto y é o discriminador. N
poderia ser substituído pelo registro da subárvore da
direita com o menor valor de y (chamado de YMIN). O Problema
é que YMIN não é necessariamente o nodo
mais à esquerda, assim como na Árvore Binária de
Busca (BST). É necessário modificar o procedimento que
encontra o menor valor de y na subárvore direita.
Uma
chamada recursiva para a rotina de deleção
removerá então o YMIN da árvore.
Finalmente, o registro YMIN é substituto para o
registro do nodo N.
Note
que podemos substituir o nodo a ser deletado pelo nodo da
subárvore direita com o menor valor apenas se a subárvore
direita existir. Se não existir, então, o elemento da
substituição deverá ser encontrado na
subárvore esquerda. Infelizmente, não é
satisfatório substituir o registro N com o registro que possui o
maior valor do discriminador da subárvore esquerda, porque este
novo valor pode ser duplicado. Então nós teríamos
iguais valores para o discriminador na subárvore esquerda de N.
Isso viola a regra para árvores kd. Felizmente, há uma
solução simples para este problema. Primeiramente,
moveremos a subárvore esquerda de N para tornarse a
subárvore direita (simplesmente trocaremos os ponteiros das
subárvores direita e esquerda de N). Neste momento, nós
procederemos com o processo normal de deleção,
substituindo o registro N a ser deletado com o registro contendo o
menor valor do discriminador da subárvore que é agora a
direita.
Aplicações:
| |